Компания «ВТО «Промышленные технологии» предлагает широкий спектр специализированных дистанционно управляемых подводных аппаратов (Remotely Operated Vehicle – ROV), предназначенных для рытья траншей на морском дне, прокладки кабелей или трубопроводов. Вся продукция отличается устойчивостью к высоким давлениям, продуманной системой энергоснабжения и передачи данных, а также возможностью работы в экстремальных глубоководных условиях.
В отличие от легких смотровых роботов, эти аппараты — настоящие «подводные экскаваторы».
Они используются для:
- Заглубления кабелей связи и электропередач для защиты от якорей и рыболовных сетей.
- Укладки трубопроводов на морском шельфе.
- Оснащены мощными гидравлическими или электрическими системами (часто более 200–400 л.с.) для работы с тяжелым грунтом.
- Способны работать на больших глубинах (до 3000 метров и более) и быстро проходить сложные участки дна.
- Используют современные методов разработки грунта —струйный размыв (jetting) или механическую резку цепными пилами.
- Аппарат соединен с судном-носителем «пуповиной» (кабелем), через которую передается энергия и команды оператора.
- Высокопроизводительные модели оснащены сонарами, камерами высокого разрешения и датчиками позиционирования для точного следования по маршруту.
Высокопроизводительные ROV обычно имеют модульную конструкцию. «Голова» (сам аппарат) содержит двигатели, электронику и камеры, а всё тяжелое рабочее оборудование выносится в съемный скейд.
Скейд равной ширины используется для:
- Размещения траншейного оборудования: В такую раму монтируют мощные водяные насосы для размыва грунта (jetting), форсунки или гидравлические манипуляторы.
- Сохранения гидродинамики: если скейд шире аппарата, он создает лишнее сопротивление и мешает маневрировать на течении. Равная ширина позволяет аппарату двигаться предсказуемо.
- Совместимости с системой запуска (LARS): Подводных роботов спускают в воду через специальные рамы-захваты или П-образные краны. Если скейд будет шире аппарата, он просто не влезет в стандартное спусковое устройство судна.
- Устойчивости на дне: при работе в режиме траншеекопателя ROV часто «садится» на дно. Широкий, соразмерный корпусу скейд работает как устойчивая платформа, не давая мощным струям воды опрокинуть аппарат.
INS (Inertial Navigation System) — это инерциальная навигационная система. В подводных аппаратах (ROV) она выполняет роль «внутреннего компаса и вестибулярного аппарата», который позволяет роботу понимать, где он находится и куда движется, без использования GPS (который под водой не работает).
Как это работает внутри ROV?
Система состоит из набора датчиков, упакованных в герметичный корпус:
- Акселерометры: измеряют ускорение по трем осям (вперед-назад, влево-вправо, вверх-вниз).
- Гироскопы: измеряют угловые скорости (повороты, крен и дифферент).
Интегрируя эти данные, компьютер INS в реальном времени высчитывает курс, положение и скорость аппарата относительно точки старта.
Почему INS критически важна для высокопроизводительных ROV?
- Работа без GPS: Радиоволны не проходят сквозь толщу воды. INS — единственный способ для робота «знать» свой путь в темноте или мутной воде.
- Точность укладки кабеля: при рытье траншеи отклонение на пару метров может быть критичным. INS в связке с доплеровским лагом (DVL) позволяет удерживать аппарат на курсе с точностью до сантиметров.
- Автопилот: Высокопроизводительные ROV используют данные INS для автоматического удержания позиции (Dynamic Positioning) даже при сильном течении.
- Построение карт: когда ROV сканирует дно сонаром, INS записывает точные координаты каждой точки, чтобы потом собрать из них 3D-карту.
DVL (Doppler Velocity Log) — это гидроакустический прибор, который измеряет скорость движения ROV относительно морского дна.
Если INS (инерциалка) — это «вестибулярный аппарат» робота, то DVL — это его «глаза», которые смотрят в пол и фиксируют, как быстро проносится мимо поверхность.
Как он работает?
Принцип основан на эффекте Доплера (изменение частоты звука при движении):
- Прибор посылает 3 или 4 узких звуковых луча вниз под углом к дну.
- Звук отражается от грунта и возвращается обратно к датчикам.
- Если ROV движется, частота отраженного звука меняется.
- Компьютер сравнивает частоты и вычисляет точную скорость по трем осям (вперед/назад, вправо/влево и вверх/вниз).
Зачем он нужен в траншейном ROV?
Без DVL высокопроизводительный робот работал бы «вслепую»:
- Исключение дрейфа: Инерциальные системы (INS) со временем накапливают ошибку (дрейф). DVL дает им опору на реальную неподвижную поверхность (дно), что позволяет «обнулять» эту ошибку.
- Режим автопилота (Station Keeping): позволяет ROV зависнуть в одной точке над дном с точностью до сантиметров, даже если его сносит мощным течением.
- Контроль скорости проходки: при рытье траншеи важно идти с постоянной скоростью (например, 200 метров в час), чтобы не повредить кабель и равномерно размывать грунт. DVL дает сверхточную информацию о фактическом перемещении.
- Определение высоты (Altitude): заодно прибор работает как точный эхолот, сообщая, на каком расстоянии от дна находится «пузо» аппарата или его траншейный скейд.
Как он выглядит?
Обычно это круглый блок с четырьмя выпуклыми «глазами» (преобразователями), расположенный в нижней части ROV и направленный строго вниз.
USBL (Ultra-Short BaseLine) — это гидроакустическая система позиционирования с ультракороткой базой. Если говорить просто, это «подводный GPS», который позволяет судну на поверхности точно знать, где в данный момент находится ROV под водой.
Как это работает?
Система состоит из двух главных компонентов:
- Трансивер (на судне): сложная антенна, опущенная под днище судна. Она посылает звуковой сигнал и принимает ответ.
- Маяк-ответчик (на ROV): небольшой прибор, закрепленный на корпусе робота.
Процесс определения координат:
- Судно посылает акустический запрос.
- Маяк на ROV «слышит» его и мгновенно отвечает.
- Антенна под судном принимает ответ. Поскольку в антенне несколько датчиков, расположенных очень близко друг к другу (отсюда и название «ультракороткая база»), система вычисляет фазовый сдвиг сигнала. Это позволяет с высокой точностью определить угол (направление на робота) и расстояние до него по времени задержки звука.
Зачем USBL нужен траншейному ROV?
В то время как INS и DVL (о которых мы говорили раньше) отвечают за перемещение робота относительно дна, USBL дает глобальную привязку относительно судна и географических координат:
- Глобальное позиционирование: позволяет наложить маршрут траншеи на электронную карту моря.
- Безопасность: пилот на мостике всегда видит на мониторе, где находится робот относительно судна, чтобы случайно не наехать на него или не перетянуть кабель-пуповину.
- Коррекция дрейфа: данные USBL используются для того, чтобы исправлять накопившуюся ошибку инерциальной системы (INS).
Главный минус
Точность USBL падает с увеличением глубины. На глубине 2000–3000 метров погрешность может составлять несколько метров, поэтому для высокопроизводительных работ USBL всегда используется в связке с INS и DVL. Это называется «комплексированием данных».
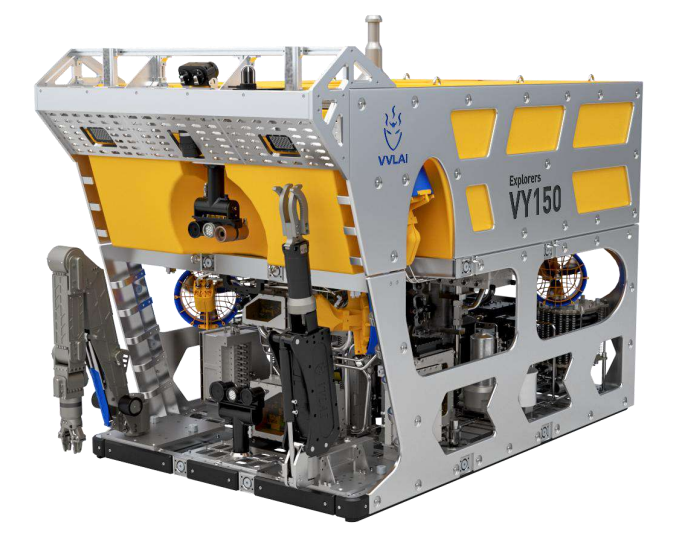
VY150 - Универсальный рабочий ROV глубоководного класса
Ключевые особенности
- Глубина погружения: до 3000 м вод. ст.
- Мощность энергоблока: 150 л.с. (115 кВт)
- Запас плавучести: 250 кг (с установленными манипуляторами и базовым оборудованием)
- Двигательная система: 4 горизонтальных + 3 вертикальных двигателя THR.Y300
- Максимальная скорость: вперёд – 3,4 узла, боковая/вертикальная – 2,2 узла
- Механические интерфейсы: 7-осевой (правый) и 5-осевой (левый) манипуляторы с дискретным или аналоговым управлением, вылет стрелы 2 м, подъёмная сила 240 кг, усилие захвата 400 кг.
- Богатый набор камер и освещения: 4 цветные камеры высокого разрешения, камера цветного зума, камера слабого освещения, широкоугольная камера, 8 светодиодных ламп.
- Опционально: расширенный набор инструментов, кастер, сонар.
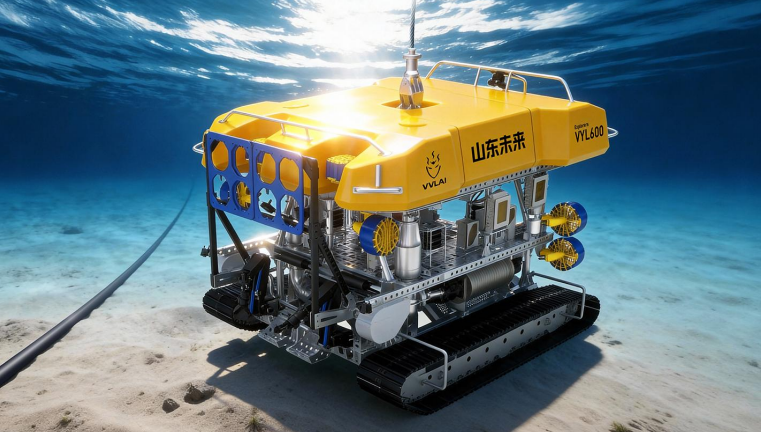
VYL600 – Траншейный робот для укладки кабелей
VYL600 – это высокопроизводительный траншейный ROV, предназначенный для прокладки подводных кабелей, пуповинных кабелей и труб малого диаметра. Оснащён мощной гидравлической системой и струйным оборудованием, позволяющим работать в различных типах грунтов – от мягкого песка до твёрдой глины. Может быть адаптирован для работы на глубине до 3000 м.
Ключевые особенности
- Глубина погружения: 2000 м (опционально до 3000 м)
- Общая мощность: 600 л.с. (440 кВт)
- Струйная система: два насоса, один – низкого давления (900 м³/ч при 5 бар), второй – высокого давления (170 кВт × 2)
- Скорость прокладки траншеи: до 500 м/ч (при ширине траншеи 500 мм и давлении 60 кПа)
- Размеры (Д×Ш×В): 5,4 м × 4,45 м × 3,2 м
- Вес: 15 тн в воздухе, 1,5 тн под водой
- Двигатели: 10×THR.Y420
- Тяговые усилия: продольное – 700 кг, боковое – 700 кг, вертикальное – 1400 кг
- Механические интерфейсы: 7-осевой (правый) и 5-осевой (левый) манипуляторы с аналоговым управлением, вылет 2 м, подъёмная сила 240 кг, усилие захвата 400 кг.
- Электрическое оснащение: три двухосевые PTZ-головки (поворот ±60°, наклон ±60°), 12 входов камер, 16 регулируемых светильников (макс. 1500 Вт).
- Опционально: система трекинга кабеля (TSS440+3501), USBL, DVL, сонары, расходомер, высотомер, глубиномер, INS.

VYL800 – Мощный траншейный робот для сложных грунтов
VYL800 ROV – это высокоэффективная система для укладки и обслуживания трубопроводов. Оснащён двумя типами мощных насосов (низкого и высокого давления), что позволяет выполнять работы в широком диапазоне грунтов – от мягкого песка до твёрдой глины. Максимальная глубина укладки траншеи достигает 3 м. Двойная рабочая консоль и новое программное обеспечение обеспечивают удобство управления, а надёжная палубная система запуска (LARS) гарантирует безопасный спуск и подъём даже при сложных морских условиях.
Ключевые особенности
- Глубина погружения: 2000 м
- Общая мощность: 800 л.с. (2×300 кВт)
- Напряжение питания: 4400 В переменного тока
- Размеры (Д×Ш×В): 6,0 м × 5,0 м × 3,3 м
- Вес: 18,5 тн в воздухе, 1,5 тн под водой
- Ширина прокладываемой траншеи: 100–600 мм, глубина до 3 м
- Двигатели: 10×THR.Y500
- Тяговые усилия: продольное ≥2,2 тн, боковое ≥1,1 тн, вертикальное ≥2,0 тн
- Механические интерфейсы: два 7-осевых манипулятора (правый и левый) с дискретным или аналоговым управлением, вылет 2 м, грузоподъёмность 240 кг, усилие захвата 400 кг.
- Струйная система: два низконапорных насоса (1000 м³/ч при 6,5 бар) и два высоконапорных (400 м³/ч при 156 бар)
- Дополнительное оборудование: передние сопла DN40/DN50, два скейда равной ширины, опционально – резак бронированного кабеля (диаметр 38–100 мм, рабочее давление 20 МПа)
- Электрическое оснащение: 5 двухосевых PTZ-головок (±60°), 14 входов камер, до 20 регулируемых светильников (макс. 1500 Вт)
- Опционально: система трекинга кабеля TSS 350+440, USBL, DVL, сонар, расходомер, высотомер, глубиномер, инерциальная навигационная система INS (Inertial Navigation System)

VYL1100 – Новое поколение траншейного ROV для глубоководных проектов
VYL1100 – флагманская модель траншейного ROV, специально разработанная для прокладки подводных кабелей, пуповинных кабелей и труб малого диаметра. Сочетает высокую мощность копания с передовой системой струйного размыва, что позволяет адаптироваться к различным типам грунта и условиям морского дна. Широко применяется при прокладке нефтегазовых трубопроводов, силовых и телекоммуникационных кабелей, а также для обслуживания подводных кабелей.
Ключевые особенности
- Глубина погружения: до 3000 м
- Общая мощность: 1100 л.с. (2×410 кВт)
- Напряжение питания: 6000 В переменного тока
- Размеры (Д×Ш×В): 6,3 м × 5,4 м × 3,8 м (с прижимным механизмом)
- Вес: 24,5–25 т в воздухе, 1,6–3,2 т под водой
- Струйная система: два насоса низкого давления (1000 м³/ч ×2) и два насоса высокого давления (400 м³/ч ×2) – аналогично VYL800, но с увеличенной мощностью привода
- Скорость движения: 0–2,2 км/ч
- Двигатели: 10×THR.Y500 (либо более мощные, согласно спецификации)
- Тяговые усилия: продольное ≥2,2 т, боковое ≥1,1 т, вертикальное ≥2,0 т
- Механические интерфейсы: два 7-осевых манипулятора (правый и левый) с дискретным или аналоговым управлением, вылет 2 м, грузоподъёмность 240 кг, усилие захвата 400 кг.
- Струйные сопла: переднее DN40
- Опционально: скользящие башмаки (два равной ширины), резак бронированного кабеля (38–100 мм, 20 МПа), резак гибкого кабеля
- Электрическое оснащение: 3 двухосевые PTZ-головки (±60°), 9 входов камер, 11 регулируемых светильников (макс. 1500 Вт)
- Опциональные датчики: система трекинга кабеля, USBL, DVL, сонар предотвращения столкновений, передний обзорный сонар, расходомер, высотомер, глубиномер, INS.
